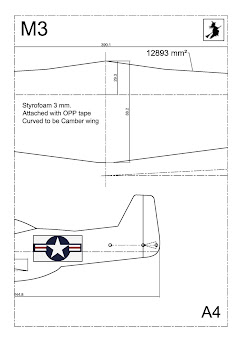
DIY. Tiny P51D Mustang wing span 390 mm.
Parts+Electronic devices
1- Micro Reciever 2.4G Flysky

2- Micro servo1.7g
1- 8520 Coreless motor + Propeller 65mm.




Partial drawing

1-Lipo 150mAh30C
1-433MHz Reciever module
1-433 MHz Remote key
Assembly drawing

Partial drawing








































